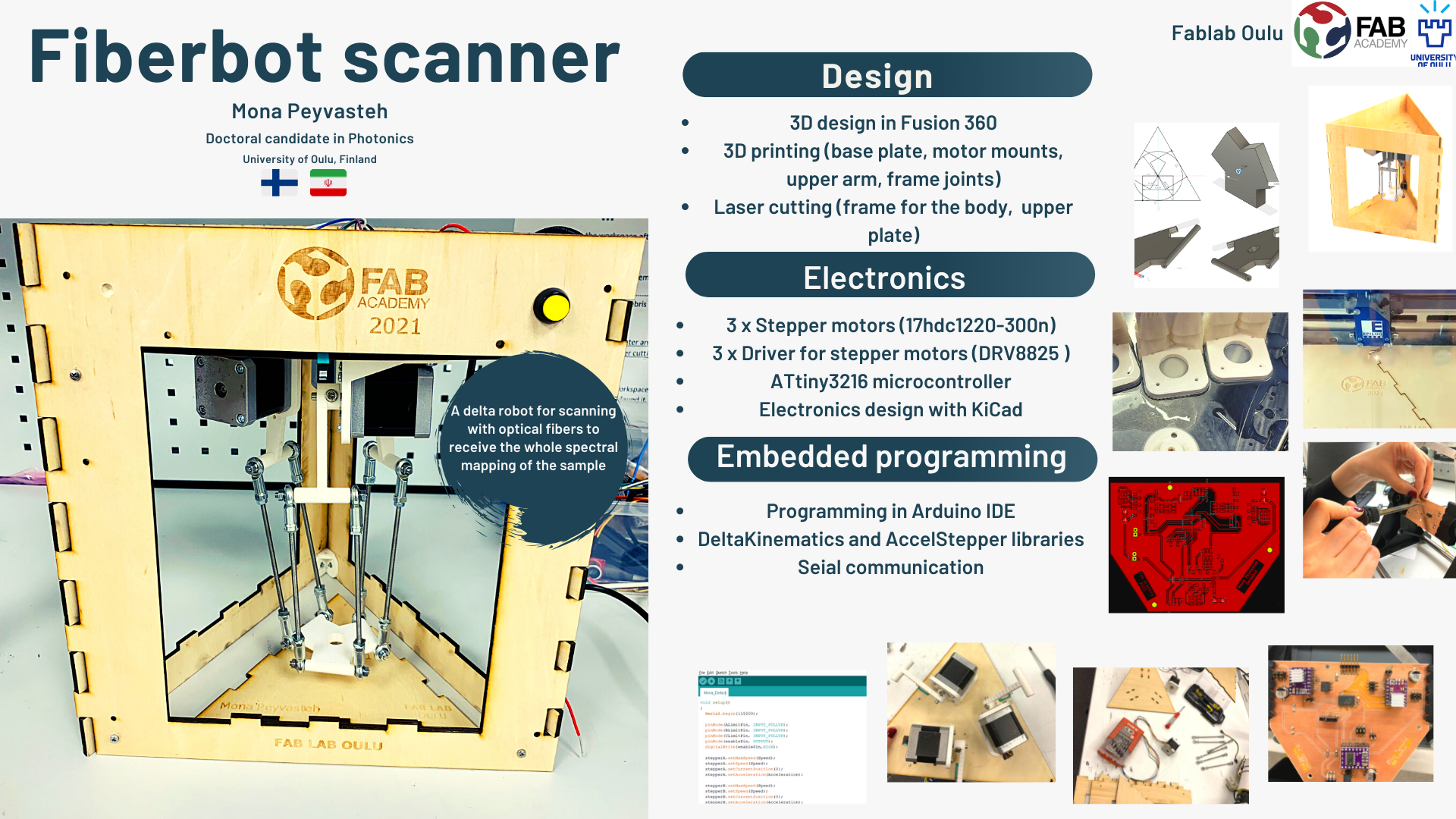
Finally, after several modifications in the body design and also coding, I succeeded to make a square movement with my deltarobot!
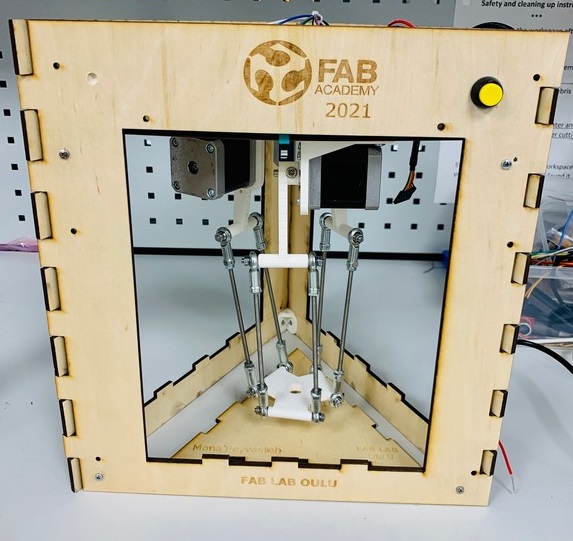
Figure 1. Hero shot of my final design*__*
Bill of materials
I had an estimated list of components on Applications and Implications week, but here I have the updated list after completing my project:
Use the CSS border property to add a border to the table.
| Component | Properties/Function | Qty | Buy/Produce | Price, EUR |
|---|---|---|---|---|
| ATtiny3216 | microcontroller | 1 | Fab Inventory | 0.86 |
| Stepper motor (17hdc1220-300n) | 1.8° step angle (200 steps/revolution)/12V DC | 3 | Fab Inventory | 33 |
| Stepper motor driver (DRV8825 ) | Six different step resolutions: full-step, half-step, 1/4-step, 1/8-step, 1/16-step, and 1/32-step | 3 | Fab Inventory | 31.35 | 1 μF capacitor | 1 | Available at local Fablab | 0.08 | 100 uF capacitor | 3 | Available at local Fablab | 0.24 | Male header (1x3) | connector | 1 | Fab Inventory | 0.24 | Male header (1x2) | connector | 3 | Fab Inventory | 0.48 | Female odd-even header (2x3) | connector | 6 | Available at local Fablab | ≈ 1.45 | horizontal male header (1x3) | UPDI | 1 | Fab Inventory | 0.24 | horizontal male header (1x6) | FTDI | 1 | Available at local Fablab | 0.48 | Screw terminal block | connector | 2 | Fab Inventory | 0.92 | Resistor 0Ω | Wire link to connect traces | 3 | Fab Inventory | 0.03 |
| Component | Properties/Function | Qty | Buy/Produce | Price, EUR | Resistor 1 KΩ | RES 1.00K OHM 1-4W 1% 1206 SMD | 1 | Fab Inventory | 0.01 | LED | LED RED CLEAR 1206 SMD | 1 | Available at local Fablab | 0.13 | screw terminal block | connector | 3 | Fab Inventory | 1.38 | Voltage regulator | IC REG LDO 5V 1A SOT223-3 | 1 | Fab Inventory | 0.45 |
|---|
| Component | Properties/Function | Qty | Buy/Produce | Price, EUR | ABS (≈35 𝒄m^3) | Upper arm connected to the motor’s shaft | 3 | Fab Inventory | 16 | ABS (2 𝒄m^3) | Joint for frames | 3 | Fab Inventory | 16 | ABS (65 𝒄m^3) | Mount for stepper motors | 3 | Fab Inventory | ≈65 |
|---|
| Component | Properties/Function | Qty | Buy/Produce | Price, EUR | Plywood (4 mm) | Motor mount holder | 1 | Fab Inventory | ≈ 20 | Plywood (4 mm) | side frame | 3 | Fab Inventory |
|---|
| Component | Properties/Function | Qty | Buy/Produce | Price, EUR | Threaded rod aluminum | Lower arm and joint bar sliding through the bearings | ≈80cm | Motonet | 2.5 | Rod end bearing | Joint for arms | 12 | Amazon | 11.5 | M5 screw | 12 screws for motor mounting to the upper plate and 6 screws for fixing the upper arm to the shaft | 18 | Available at local Fablab | ≈5.2 | M4 screw | For motors mounting | 12 | Available at local Fablab | ≈3.5 | M3 screw | For fixing frame joints and board mounting | 23 | Available at local Fablab | ≈0.9 | M5 nut | For fixing motor mounting | 12 | Available at local Fablab | ≈0.3 | M4 nut | For fixing the rod end bearings | 12 | Available at local Fablab | ≈0.3 | M3 nut | For frame joints | 12 | Available at local Fablab | ≈0.3 | Hex Standoff Threaded M3 Aluminum | Fix the board to the plate | 8 | Available at local Fablab | ≈1.8 |
|---|
Licence
Since I am going to make my project available for anyone, I will use these license for non-software part of m project:
- ShareAlike (sa): You let others copy, distribute, display, perform, and modify your work, as long as they distribute any modified work on the same terms. If they want to distribute modified works under other terms, they must get your permission first.
- NonCommercial (nc): You let others copy, distribute, display, perform, and (unless you have chosen NoDerivatives) modify and use your work for any purpose other than commercially unless they get your permission first.
Files
2D/3D design
- Frame(.f3z)
- Frame 1(.pdf)
- Frame 2(.pdf)
- Frame 3(.pdf)
- Motor mount plate(.pdf)
- Upper arm(.stl)
- Upper arm(.f3d)
- Frame joint(.stl)
- Frame joint(.f3d)
- Base plate(.stl)
- Base plate(.f3d)
